Electromagnetic Navigation System
Electromagnetic Navigation System (ENS) is one the most powerful technology to remotely manipulate and navigate the magnetic objects. These magnetic objects can be a hard magnet (permanent magnet, PM), a soft magnet (iron, nickel, etc.), or magnetic materials embedded on a tethered robots (catheters)/untethered robots (micro/nanorobots), which can be magnetically driven by exerting a magnetic torque and force on it. Let’s consider a magnetic object place inside a magnetic field (generated by the ENS), the object is firstly magnetized. Its magnetization depends on its material. In case of PM, it’s a constant in term of amplitude and orientation. On the other hand, the object made of soft-magnet, its magnetization value will vary significantly with field strength and its orientation will be placed along the longest length of robot’s body. The differences between the magnetization and magnetic field will induce the magnetic torque. The magnetic force is induced by the field gradient and tend to follow the positive pose of gradient field. Depending on the structure of object and the way we exert magnetic force and torque to it, it will result in different locomotion.
Design of Electromagnetic navigation system
I have been developing the Electromagnetic manipulation systems at different scales with various magnetic systems including:
- High-frequency, high-powered EMAs for control of helical swimmers
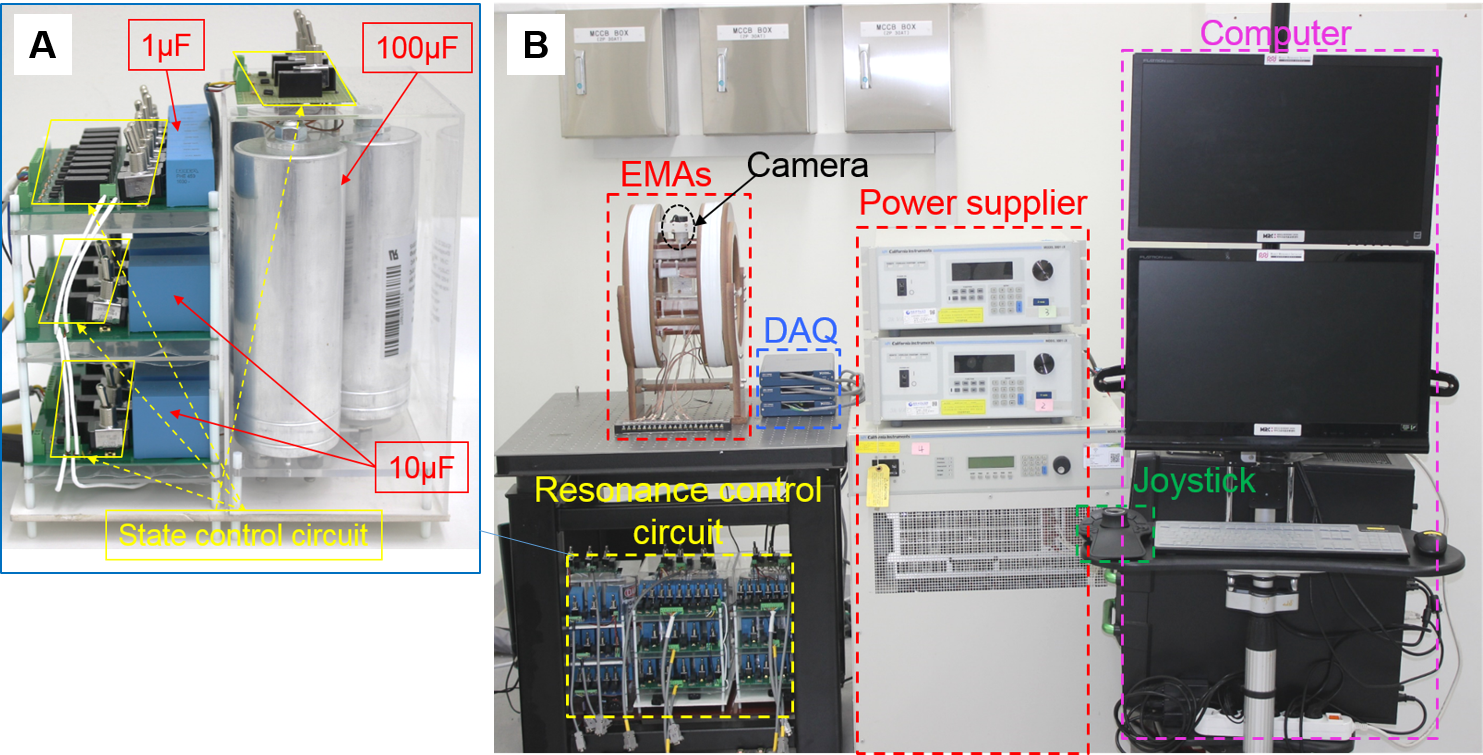 High-frequency and High-powered Electromagnetic Actuation System Utilizing Two-stage Resonant Effects,
IEEE/ASME Transactions on Mechatronics, 2020/2/14,DOI:10.1109/TMECH.2020.2974069,
High-frequency and High-powered Electromagnetic Actuation System Utilizing Two-stage Resonant Effects,
IEEE/ASME Transactions on Mechatronics, 2020/2/14,DOI:10.1109/TMECH.2020.2974069,
Abstract
This study presents a novel design and a control methodology for an electromagnetic actuation (EMA) system that can generate a high-frequency and high-powered electromagnetic field for enhanced electromagnetic torque and force. The proposed system consists of a two-stage resonance effect control circuit utilizing resonant effects and an automatic capacitance switching method matching the desired frequency. The first resonant effect control stage, which is called the series resonance, is comprised of various capacitors connected with the EMA system, and is designed to compensate for rapid impedance change and phase delay. The second resonant effect control stage, which is called the current-amplified resonant circuit, is integrated to amplify coil currents for high-frequency operation. In addition, the automatically controllable continuous capacitance switching method is proposed to enhance the magnetic field with respect to the desired operating frequency in a wide range. Finally, the resonance control system is applied to the conventional EMA system. In-vitro experiments were conducted on three-dimensional locomotion and a drilling motion control for a helical-shaped microrobot. Both simulation and experimental results showed a significant improvement in the microrobot locomotion ability, speed (235%), and driving force (900%) with respect to the conventional design. The developed EMA control circuit and algorithm can magnify the input current nearly twice the conventional EMA system and extend the operating frequency to a maximum of 370 Hz.- EMAs for control of Magnetic catheters
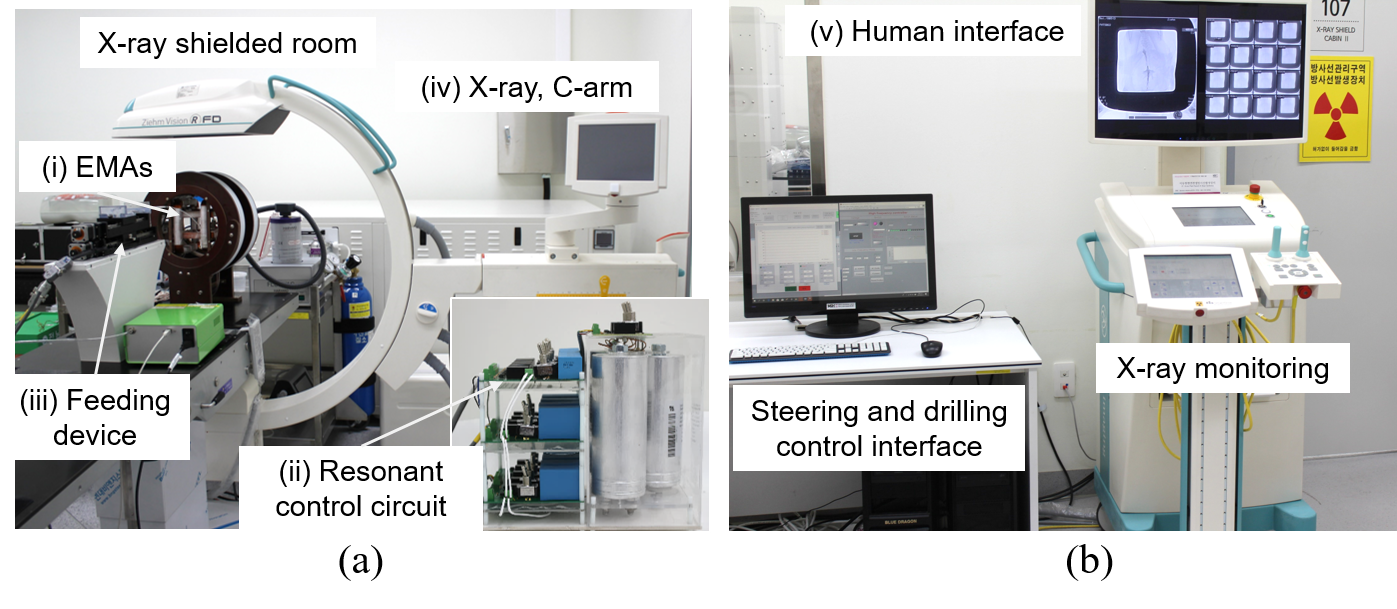 Guide-wired Helical Microrobot for Percutaneous Revascularization in Chronic Total Occlusion in-vivo Validation, IEEE Transactions on Biomedical Engineering, 2020/12/22,DOI: 10.1109/TBME.2020.3046513
Guide-wired Helical Microrobot for Percutaneous Revascularization in Chronic Total Occlusion in-vivo Validation, IEEE Transactions on Biomedical Engineering, 2020/12/22,DOI: 10.1109/TBME.2020.3046513
Abstract
Objective: For the revascularization in small vessels such as coronary arteries, we present a guide-wired helical microrobot mimicking the corkscrew motion for mechanical atherectomy that enables autonomous therapeutics and minimizing the radiation exposure to clinicians. Methods: The microrobot is fabricated with a spherical joint and a guidewire. A previously developed external electromagnetic manipulation system capable of high power and frequency is incorporated and an autonomous guidance motion control including driving and steering is implemented in the prototype. We tested the validity of our approach in animal experiments under clinical settings. For the in vivo test, artificial thrombus was fabricated and placed in a small vessel and atherectomy procedures were conducted. Results: The devised approach enables us to navigate the helical robot to the target area and successfully unclog the thrombosis in rat models in vivo. Conclusion: This technology overcomes several limitations associated with a small vessel environment and promises to advance medical microrobotics for real clinical applications while achieving intact operation and minimizing radiation exposures to clinicians. Significance: Advanced microrobot based on multi-discipline technology could be validated in vivo for the first time and that may foster the microrobot application at clinical sites.- Cored-EMAs for Mili/micro/Nanorobots
 Multifunctional nanorobot system for active therapeutic delivery and synergistic chemo-photothermal therapy, Nano Letters, 19(12), 8550-8564, DOI:10.1021/acs.nanolett.9b03051
Multifunctional nanorobot system for active therapeutic delivery and synergistic chemo-photothermal therapy, Nano Letters, 19(12), 8550-8564, DOI:10.1021/acs.nanolett.9b03051
Abstract
Nanorobots are safe and exhibit powerful functionalities, including delivery, therapy, and diagnosis. Therefore, they are in high demand for the development of new cancer therapies. Although many studies have contributed to the progressive development of the nanorobot system for anticancer drug delivery, these systems still face some critical limitations, such as potentially toxic materials in the nanorobots, unreasonable sizes for passive targeting, and the lack of several essential functions of the nanorobot for anticancer drug delivery including sensing, active targeting, controlling drug release, and sufficient drug loading capacity. Here, we developed a multifunctional nanorobot system capable of precise magnetic control, sufficient drug loading for chemotherapy, light-triggered controlled drug release, light absorption for photothermal therapy, enhanced magnetic resonance imaging, and tumor sensing. The developed nanorobot system exhibits an in vitro synergetic antitumor effect of photothermal therapy and chemotherapy and outstanding tumor-targeting efficiency in both in vitro and in vivo environments. The results of this study encourage further explorations of an efficient active drug delivery system for cancer treatment and the development of nanorobot systems for other biomedical applications.
 Locomotion and disaggregation control of paramagnetic nanoclusters using wireless electromagnetic fields for enhanced targeted drug delivery, Scientific reports, 11(1), 15122,DOI:10.1038/s41598-021-94446-4
Locomotion and disaggregation control of paramagnetic nanoclusters using wireless electromagnetic fields for enhanced targeted drug delivery, Scientific reports, 11(1), 15122,DOI:10.1038/s41598-021-94446-4
Abstract
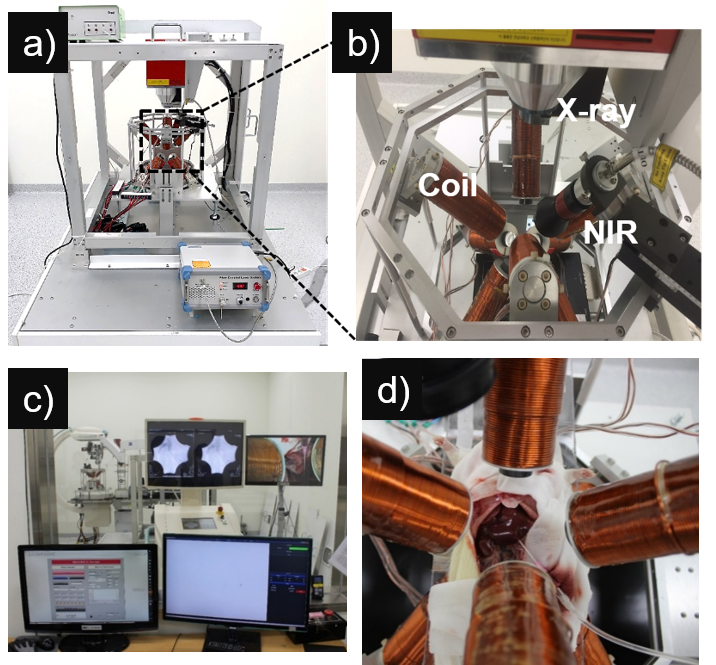
Magnetic nanorobots (MNRs) based on paramagnetic nanoparticles/nanoclusters for the targeted therapeutics of anticancer drugs have been highlighted for their efficiency potential. Controlling the locomotion of the MNRs is a key challenge for effective delivery to the target legions. Here, we present a method for controlling paramagnetic nanoclusters through enhanced tumbling and disaggregation motions with a combination of rotating field and gradient field generated by external electromagnets. The mechanism is carried out via an electromagnetic actuation system capable of generating MNR motions with five degrees of freedom in a spherical workspace without singularity. The nanocluster swarm structures can successfully pass through channels to the target region where they can disaggregate. The results show significantly faster response and higher targeting rate by using rotating magnetic and gradient fields. The mean velocities of the enhanced tumbling motion are twice those of the conventional tumbling motion and approximately 130% higher than the gradient pulling motion. The effects of each fundamental factor on the locomotion are investigated for further MNR applications. The locomotion speed of the MNR could be predicted by the proposed mathematical model and agrees well with experimental results. The high access rate and disaggregation performance insights the potentials for targeted drug delivery application.
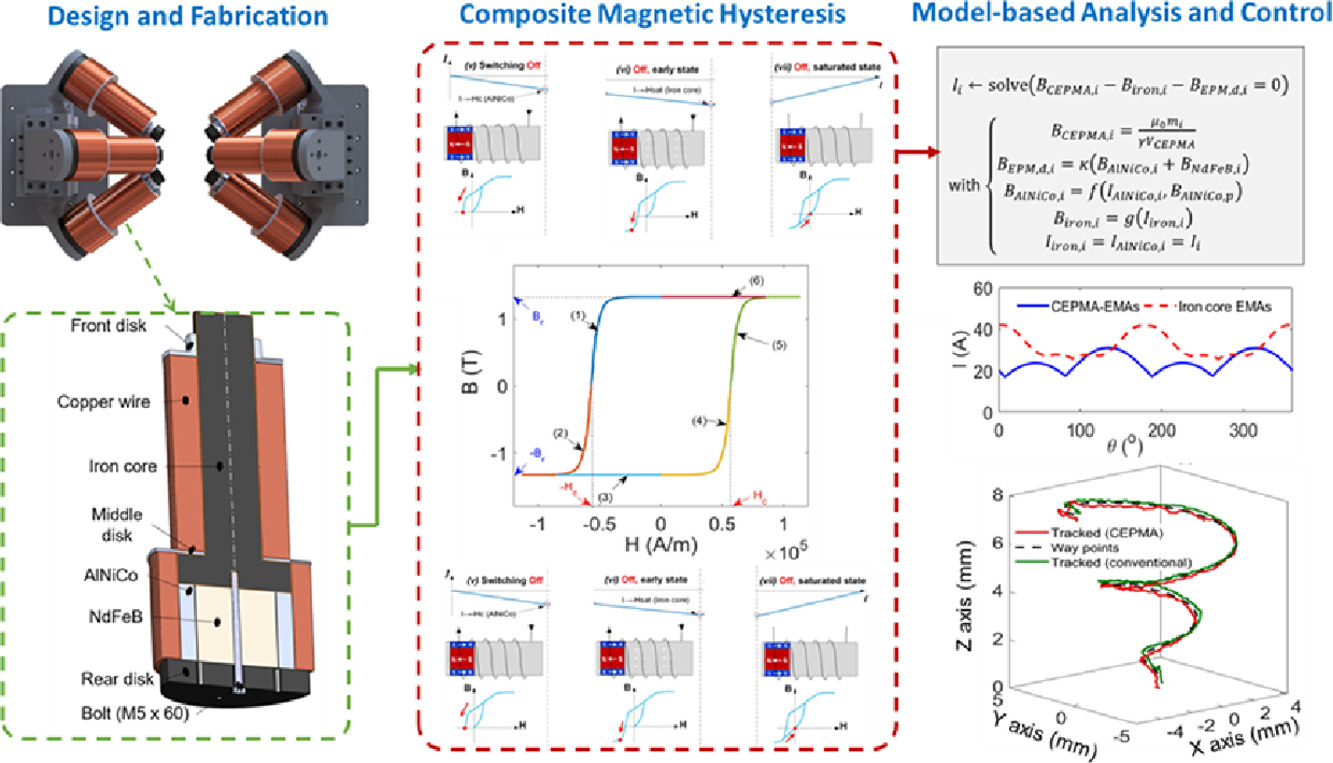 A composite electro-permanent magnetic actuator for microrobot manipulation, International Journal of Mechanical Sciences, 2022,DOI:10.1016/j.ijmecsci.2022.107516
A composite electro-permanent magnetic actuator for microrobot manipulation, International Journal of Mechanical Sciences, 2022,DOI:10.1016/j.ijmecsci.2022.107516
Abstract
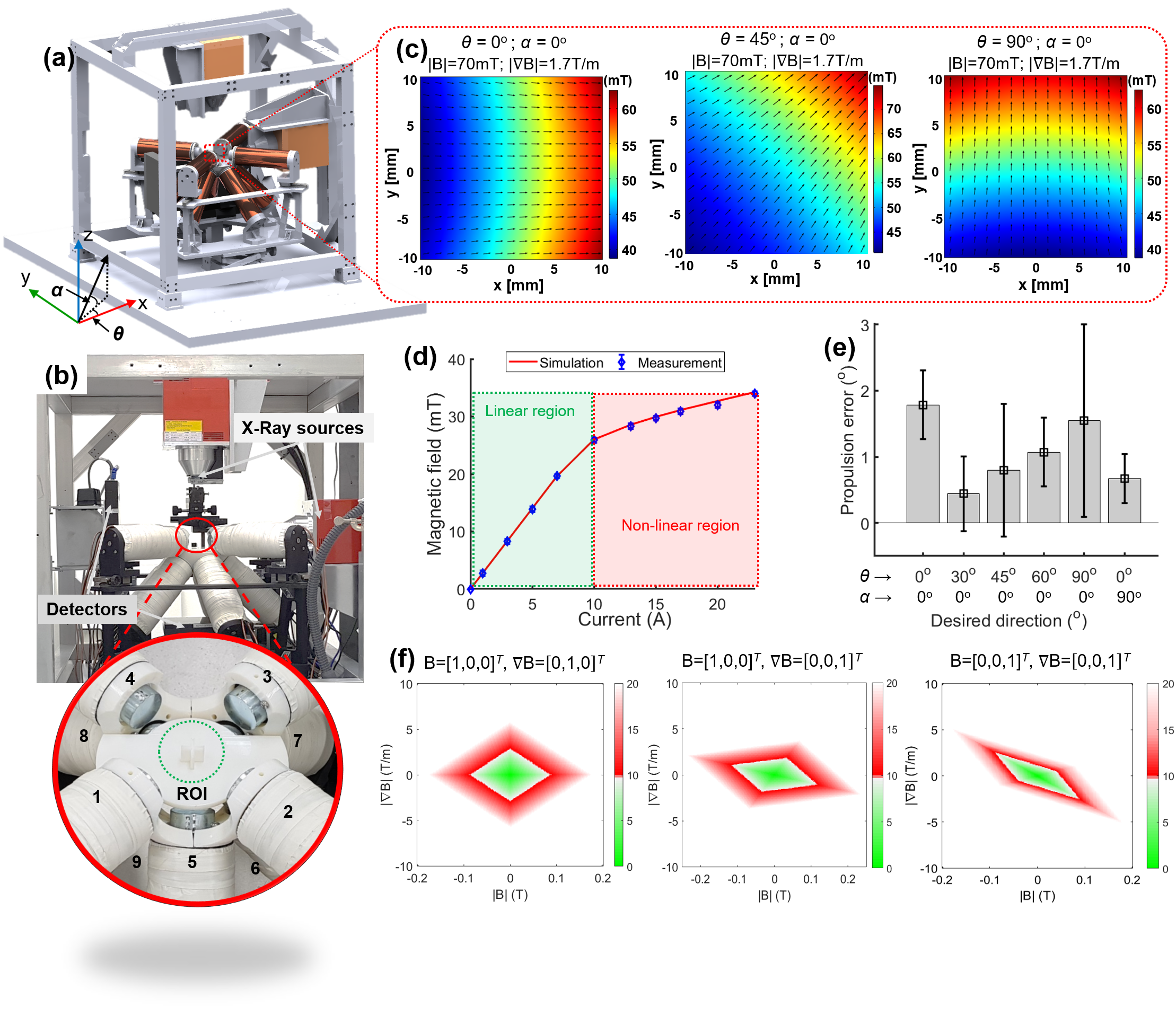
The properties of conventionally utilized magnetic cores limit the generation of a strong controllable magnetic force for the manipulation of micro-/nanorobots. This study proposes a novel electro-permanent magnetic actuator having a composite core structure that can significantly improve the magnetic field and field gradient. The core structure, called the composite electro-permanent magnetic actuator (CEPMA), consists of a hybrid permanent magnet sandwiched between an iron core and iron disk with a copper wire wound around it. . The CEPMA creates a strong magnetic field and enables the switching on/off of the magnetic field. A prototype of a magnetic actuator system using six CEPMAs was built with optimal parameters and was capable of 3-dimensional (3D) position control with a maximum achievable field and gradient field of 124 mT and 1.9 T/m, respectively, by utilizing a lower power consumption. We derived a mathematical model and control approach to address its hysteresis property and obtain a current input for the desired magnetic force for precise control of a microrobot. The theoretical analysis and experimental validation of CEPMA indicated that the proposed structure could enhance the controllable magnetic field and gradient field by up to 30% compared to the conventional iron core electromagnet. The system was also tested for 3D manipulating different microrobots in an in vitro environment with high accuracy. The experimental results demonstrate the potential of this newly developed platform for manipulating microrobots with high throughput.